Advantages of introducing clean transfer robot ACTRANS





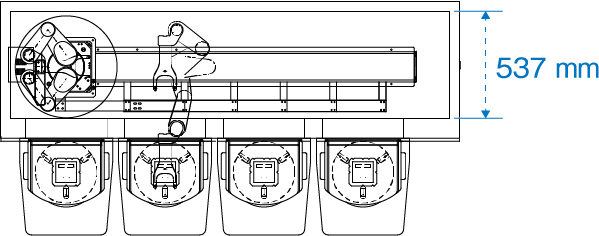
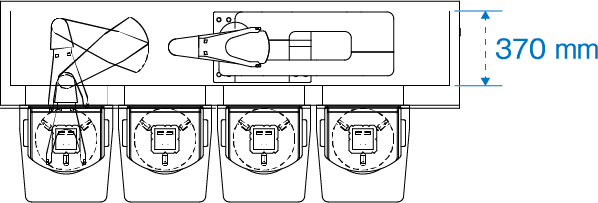
Vertical articulated and two-axis
horizontal SCARA motion minimizes
EFEM
transport space
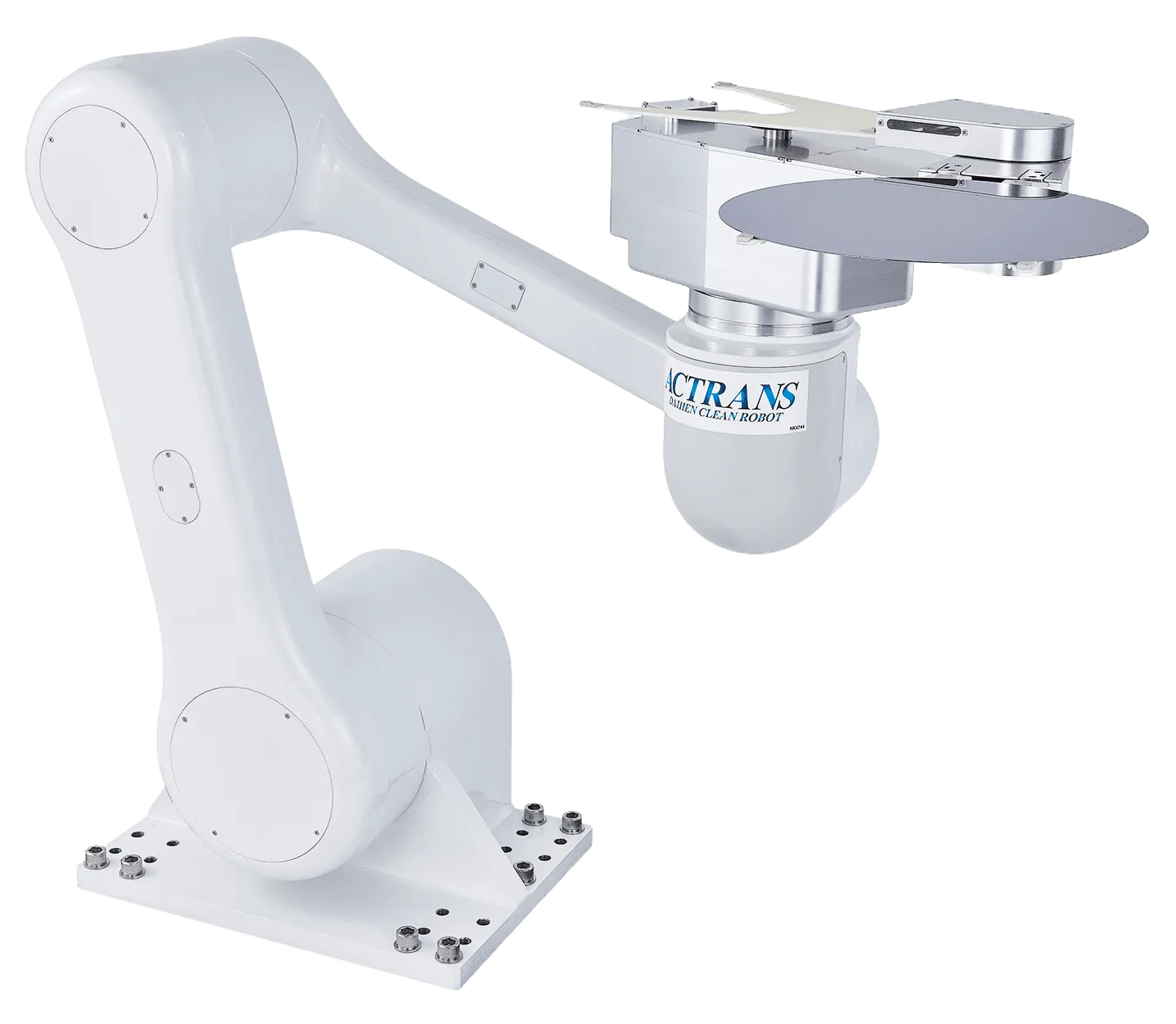
Advantages of introducing clean transfer robot ACTRANS
| Model | UT-AXW3000NS | UT-AXW3001NS | |
|---|---|---|---|
| Robot type | 6 axis Vertical Articulated Type | ||
| Wafer Gripping Method | Vacuum check/Edge clamp | ||
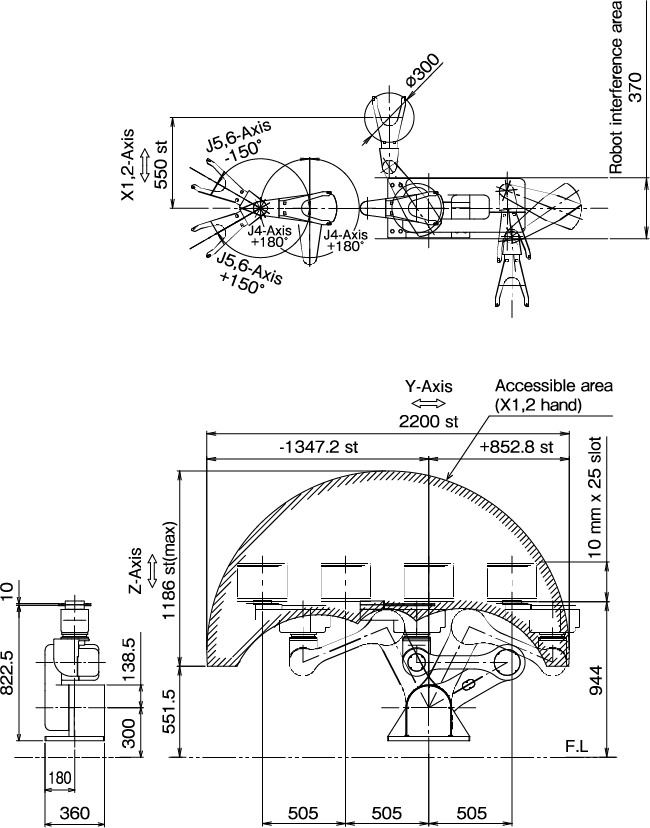
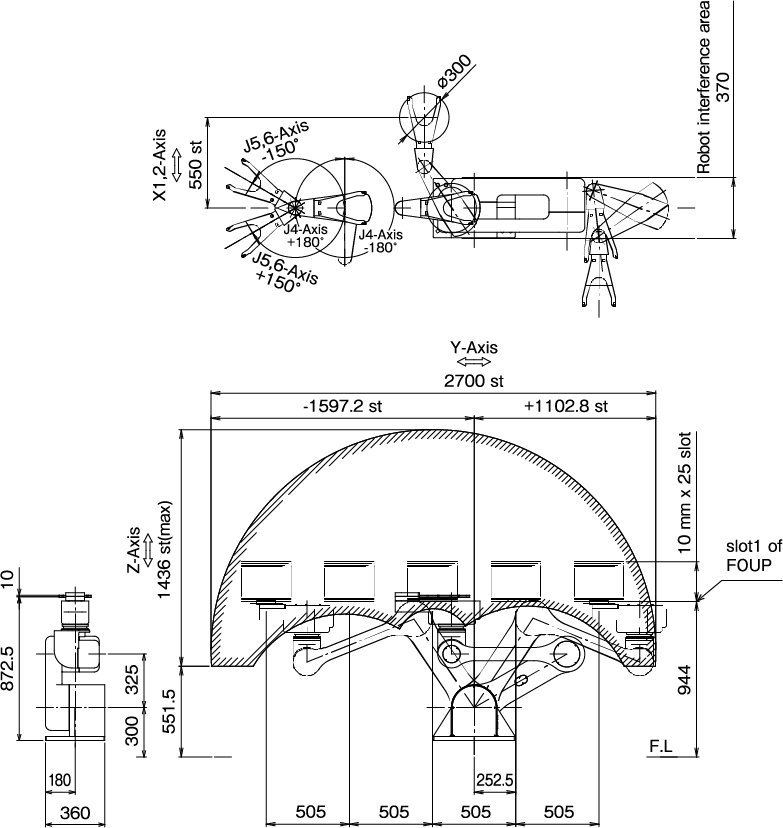
| Operating range (※2) | X-axis | 550mm | |
| Y-axis | 2200mm | 2700mm | |
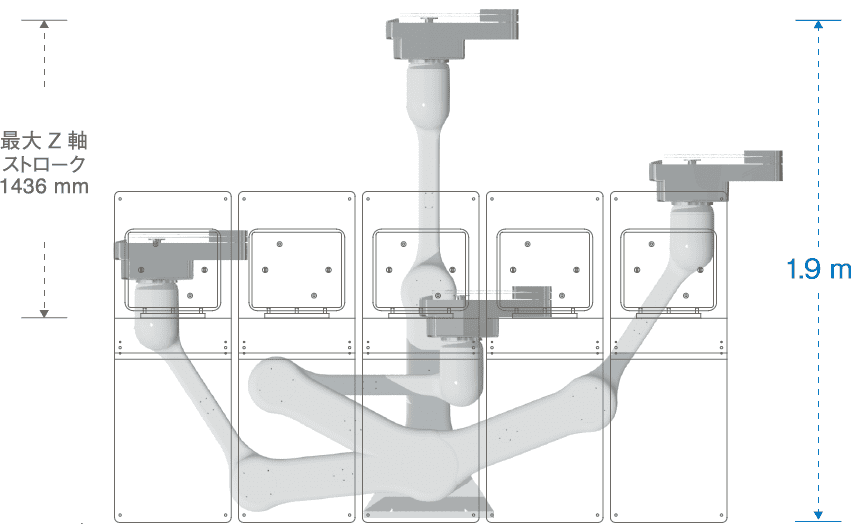
| Z-axis | 1186mm | 1436mm | |
| Max. Operating Speed | X-axis | 1500mm / sec | |
| Y-axis | 1500mm / sec | ||
| Z-axis | 1500mm / sec | ||
| Repeatability | XYZ direction: ±0.05 mm each (※3) | ||
| Payload | 2.0kg (※4) | ||
| Cleanliness | ISO Class 1 | ||
| Mass | Approx. 150 kg | Approx. 155 kg | |
| Environment | Temperature | 5-40°C | |
| Humidity | 20-70%, No condensation | ||
※1. Transfer perfomance differs from the standard when options are
added.
※2. Some arm positions are restrictive.
※3. By in our evaluation
condition.
※4. Including Hand-base, Hand and Wafer.

Q&A - Frequently Asked Questions -