



Advantages of introducing clean transfer robot ACTRANS








High-payload model for wafers up to 300mm
Standard robot capable of high-payload transfer
and wide operating range
Significantly reduces wiring in the robot body and the number of external distribution cables through use of high-speed power line communication technology with a built-in servo amplifier.
Flip axis can be mounted because high-payload transfer (total mass of
hand folder, hand, and work transferred is 4kg) can be performed.
Can
transfer wafers with tape frame, bonded wafers, and reticles.
Wafers can be gripped not only by the vacuum chuck method, but also the edge clamp method using compressed air, and the Bernoulli method.

Advantages of introducing clean transfer robot ACTRANS
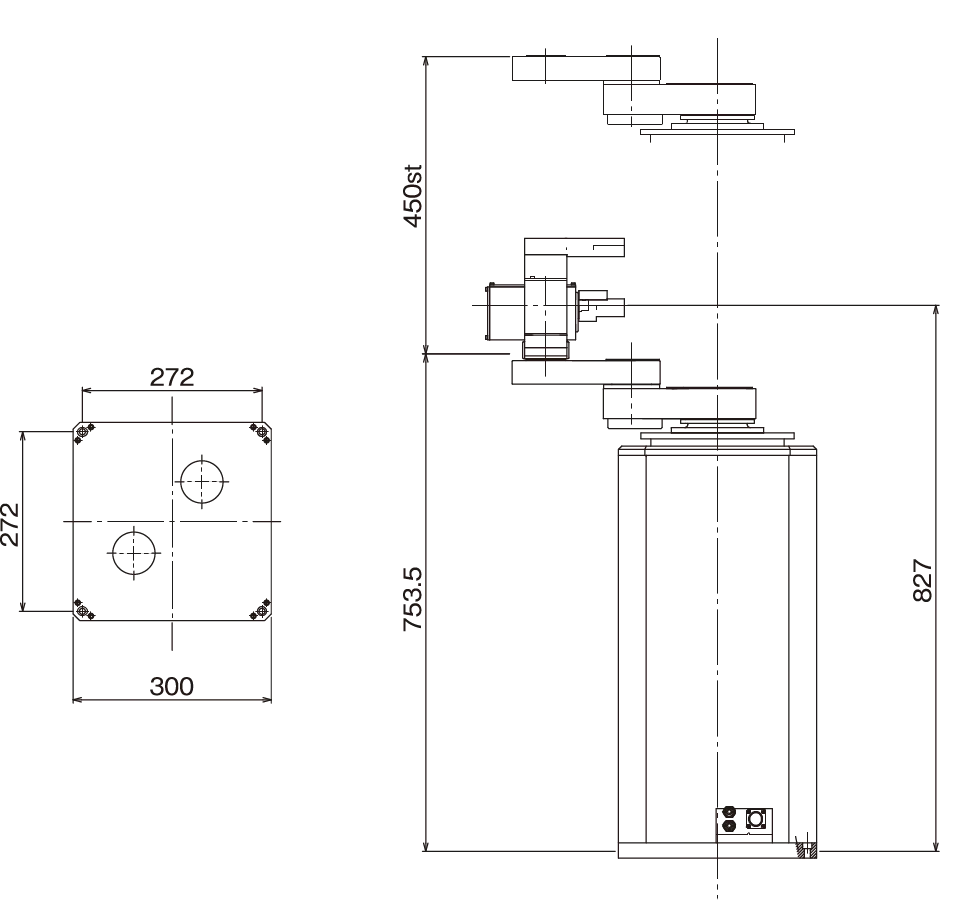
| Model | UT-AFW4010NM | UT-AFW4000NM | |
|---|---|---|---|
| Category | Long Arm Type | High Payload Type | |
| Robot Type | 4axis Cylindrical Coordinate | ||
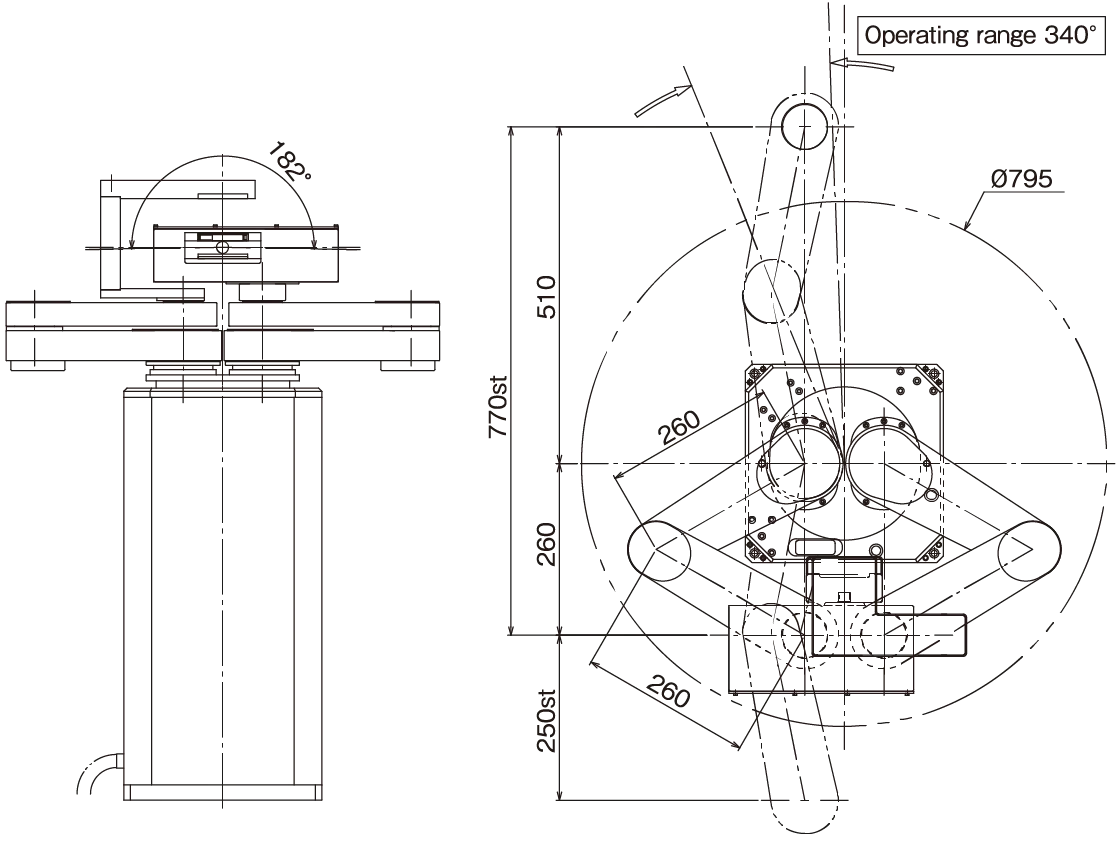
| Operation Range | X1, X2-axis | 770mm | 500mm |
| θ-axis | 340° | ||
| Z-axis | 300mm or 450mm | ||
| R-axis | - | (182°) | |
| Max. Operation Speed | X1, X2-axis | 1180mm/sec. | 800mm/sec. |
| θ-axis | 200°/sec. | ||
| Z-axis | 250mm/sec. | ||
| R-axis | - | (180°/sec.) | |
| Operation Time | X1, X2-axis | 1.7sec./770mm | 1.7sec./500mm |
| θ-axis | 2.2sec./340° | ||
| Z-axis | 1.6sec./300mm | 2.2sec./450mm | |
| R-axis | - | (1.7sec./180°) | |
| Repeatability | XYZ±0.1mm |
XYZ±0.1mm, R±0.1° | |
| Payload | 1kg/2N・m (※2) | 4kg/8N・m (※2) | |
| Cleanliness | Edge Clamp E/E Type | ISO Class 3 (ISO-14644) | |
| Vacuum E/E Type | ISO Class 1 (ISO-14644) | ||
| Utilities | Air | - | 0.4-0.7MPa, 200L/min |
| Vacuum | -80kPa, 10NL/min | - | |
| Environment | Temperature | 0-40℃ | |
| Humidity | 70% or less, No condensation | ||
※1 Transfer performance differs from the standard when options are added.
※2 Total mass of hand folder, hand, and work

Q&A - Frequently Asked Questions -






