ACTRANS
導入のメリット






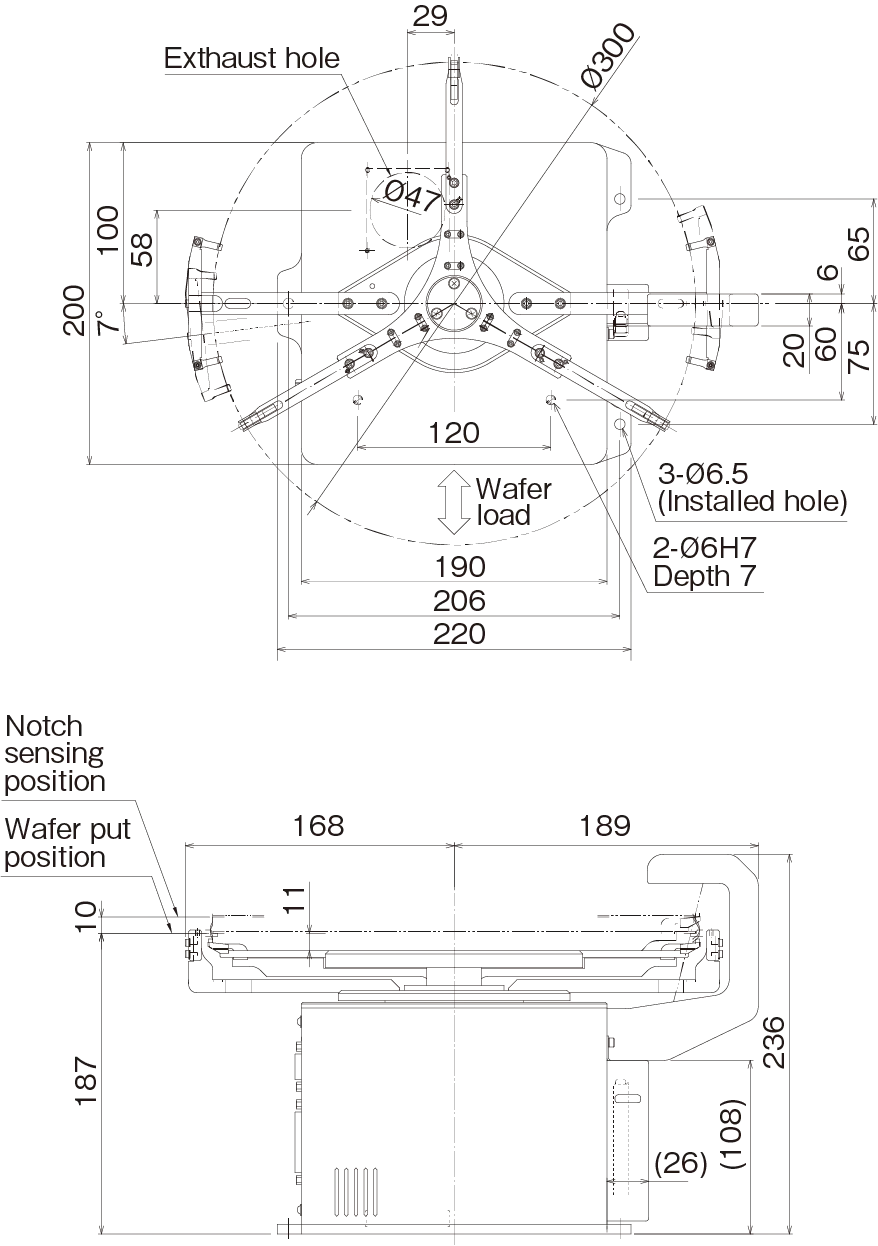
50~300mmウエハ用
高速アライメントが可能なアライナ
| 型式 Model | OFH-4100 | OFH-4101 | OFH-4102 | OFH-4103 | |
|---|---|---|---|---|---|
|
適用ウエハサイズ Applicable Wafer Size (※1) |
200-300mm | 150-200mm | 100-200mm | 50-150mm | |
| 繰返し位置精度 Repeatability | XY方向:各±0.1mm、θ方向:±0.2° | ||||
| アライメント時間 Alignment Time | 1.8sec. (※2) | ||||
| クリーン度 Cleanliness | ISO Class 3 (ISO-14644) | ||||
| 本体質量 Mass | 8kg | ||||
|
必要諸源 Facilities |
真空 Vacuum | -80KPag or less, 10NL/min | |||
| 電源 Power | 24 VDC 3A | ||||
|
設置環境 Environment |
温度 Temperature | 15-25℃ | |||
| 湿度 Humidity | 60% or less (No condensation) | ||||
※1
石英ウエハ対応品としてOFH-4100Qシリーズがあります。詳細はお問い合わせください
※2
50mmウエハの場合、アライメント時間は2.5sec.です
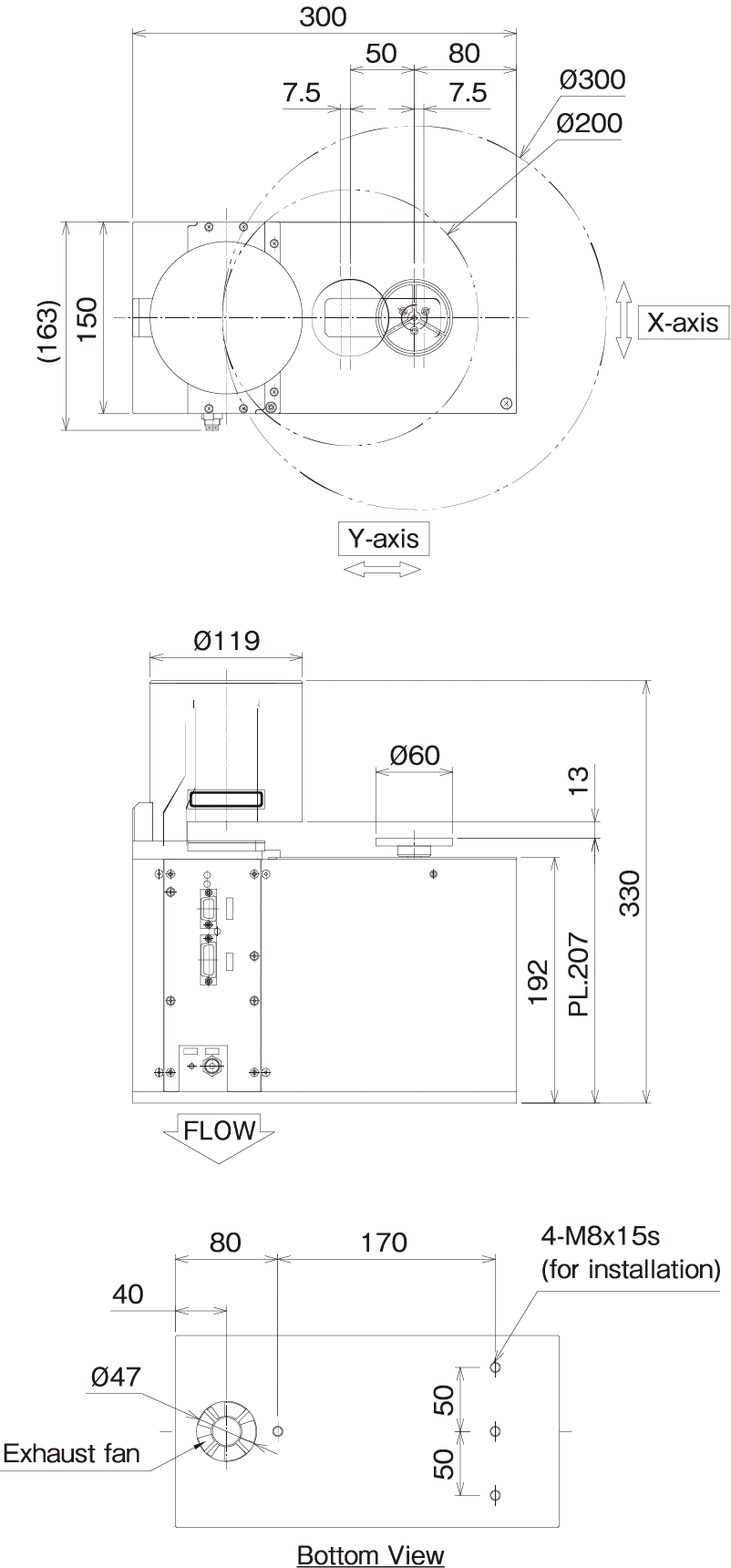

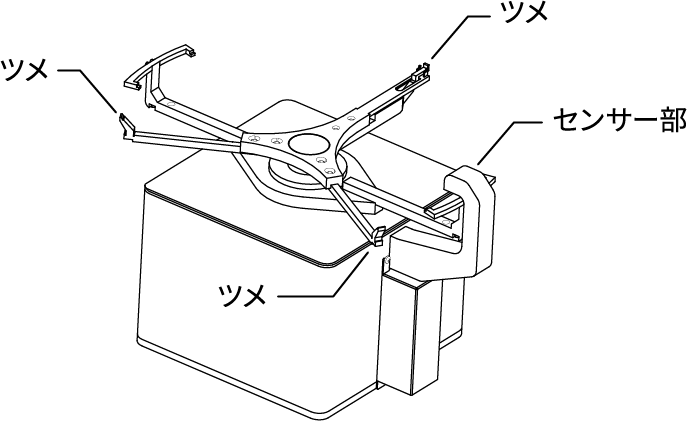
300mmウエハ用
ウエハ裏面に接触しない
エッジグリップタイプのアライナ
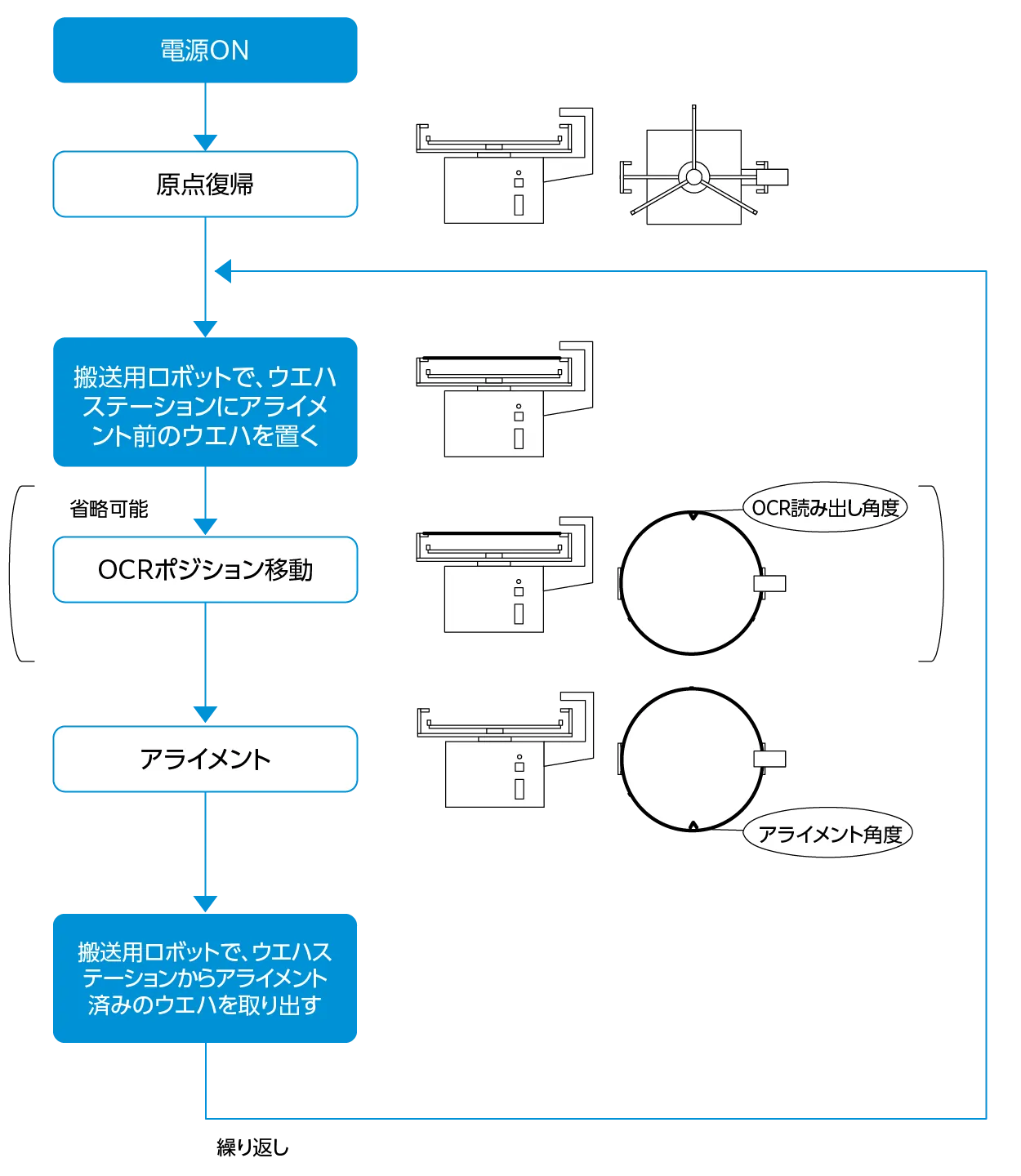
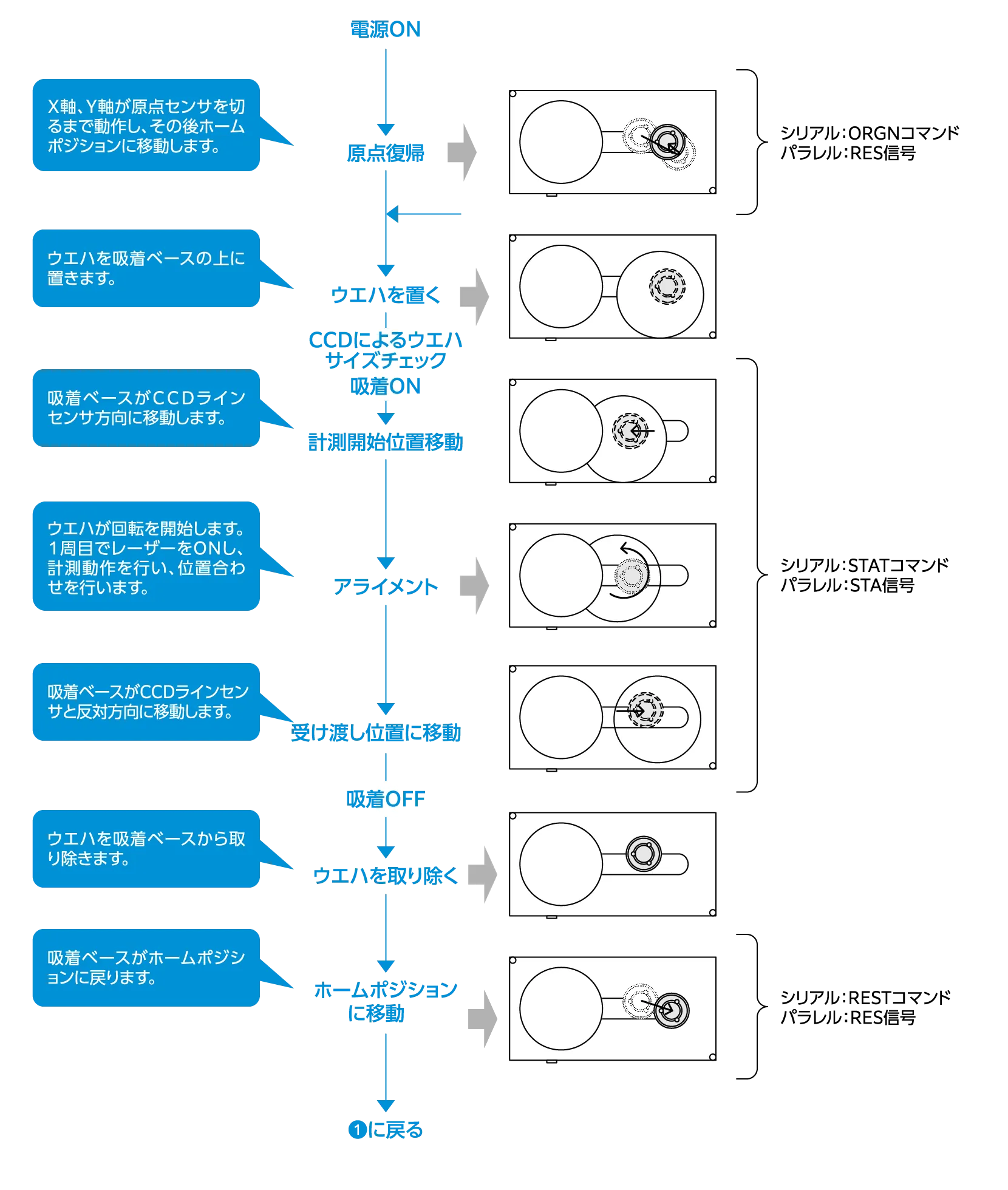
「原点復帰」コマンドにより、EGは「搬送用ロボットがEGへウエハを収納、および、取出し可能な位置」にアーム部を移動します。
EGがウエハを「OCR読み出し角度」に合わせ「OCRポジション」に移動させます。お客様側のシステムによりOCR読み出し操作を行ってください。
EGがウエハを「アライメント角度」に合わせ、ウエハステーションに置きます。その後、搬送用ロボットがEGにアクセス可能な位置にアーム部を移動します。
| 型式 Model | EG-303 | |
|---|---|---|
| 適用ウエハサイズ Applicable Wafer Size | 300mm | |
|
繰返し位置精度 Repeatability |
高精細モード High Accuracy Mode | XY: ±0.05mm θ: ±0.075° |
| ノーマルモード Normal Mode | XY: ±0.2mm θ: ±0.1° | |
|
アライメント時間 Alignment Time |
高精細モード High Accuracy Mode | Average 7.5sec. |
| ノーマルモード Normal Mode | Average 3.5sec. | |
| クリーン度 Cleanliness | ISO Class 3 (ISO-14644) | |
| 本体質量 Mass | 7kg | |
| 必要諸源 Facilities | 電源 Power | 24 VDC 3A |
|
設置環境 Environment |
温度 Temperature | 0-40℃ |
| 湿度 Humidity | 70% or less (No condensation) | |