



Advantages of introducing clean transfer robot ACTRANS




A vacuum robot that saves space
by mounting a SCARA arm and
achieves high precision and
low vibration with a direct drive motor.
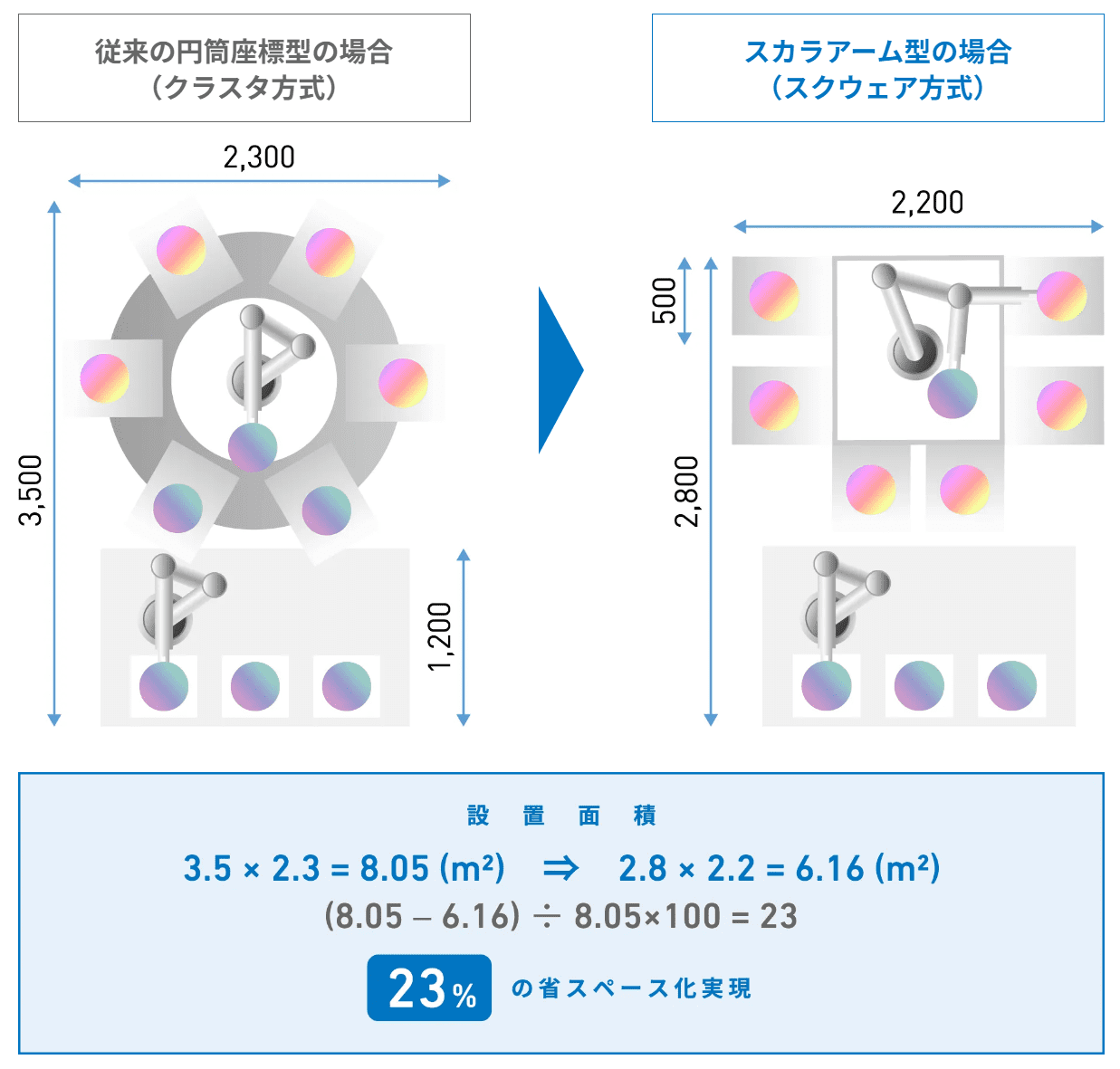
Currently, a cylindrical coordinate type robot is used in cluster formation that makes movements of the robot arm easy to understand, but the footprint of the vacuum equipment becomes larger due to circular transfer module. By changing cluster formation to square formation and using a SCARA arm type robot to transfer wafers, the footprint of the vacuum equipment can be reduced.
Advantages of introducing clean transfer robot ACTRANS
| Model | UT-VSW3001NS | UT-VSW3002NS | |
|---|---|---|---|
| Robot type | 5 axis SCARA | ||
| Wafer Gripping Method | Friction gripping method | ||
| Operating range (※2) | W2-axis (Upper wrist axis) | 20-340° | |
| W2-axis (Upper wrist axis) | 20-340° | ||
| B-axis | 20-340° | ||
| A-axis | Endless | ||
| Z-axis | 50mm | 135mm | |
| Max. Operating Speed | W2-axis (Upper wrist axis) | 150° /sec | |
| W2-axis (Upper wrist axis) | 150° /sec | ||
| B-axis | Composite interpolation 950 mm/sec | ||
| A-axis | |||
| Z-axis | 32 mm/sec | ||
| Repeatability | XYZ direction: P-P 0.05 mm each (※3) | ||
| Payload | 1.0kg (※4) | ||
| Cleanliness | ISO Class 1 | ||
| Mass | Approx. 260 kg | Approx. 285 kg | |
| Environment | Temperature | 5-40 ℃ (Robot body) / 5-80 ℃(Arm) | |
| Humidity | 20-70%, No condensation | ||
| Pressure | Atomospheric pressure ~ 10-6 Pa | ||
| Controller | CFD19A2 | ||
※1. Transfer perfomance differs from the standard when options are added.
※2. Some arm positions are restrictive.
※3. By in our evaluation condition.
※4. Including Hand-base, Hand and Wafer.

Q&A - Frequently Asked Questions -






