



Advantages of introducing clean transfer robot ACTRANS




For wafers up to 300mm
High-precision,
low-vibration double-arm vacuum robot
for high-temperature processes
The table below shows examples of takt time elapsing from the time when a processed wafer is replaced with a pre-processing wafer in PM (process module) and the processed wafer is replaced with the pre-processing wafer placed in LL (load lock module) to the time when the robot is in standby in front of the process module.
| Operating time (sec.) | ||||||
|---|---|---|---|---|---|---|
| Access module | Command | Hand(s) selected | Motion | Stroke |
PAD-less (0.15G)* |
PAD-included (0.3G)* |
| PM | GET_RETRACT | H1 | Arm extension | X: 670mm | 1.5 | 1.2 |
| Z-axis up | Z: 8mm | 0.8 | 0.8 | |||
| Arm retraction | X: 670mm | 1.5 | 1.2 | |||
| PUT_WAIT | H1→H2 | Hand change | Z: 14mm | 1.0 | 1.0 | |
| PUT_RETRACT | H2 | Arm extension | X: 670mm | 1.5 | 1.2 | |
| Z-axis down | Z: 8mm | 0.8 | 0.8 | |||
| Arm retraction | X: 670mm | 1.5 | 1.2 | |||
| GET_WAIT | Rotation | θ: 180deg | 2.7 | 2.0 | ||
| LL | GET_RETRACT | H2 | Arm extension | X: 620mm | 1.5 | 1.1 |
| Z-axis up | Z: 8mm | 0.8 | 0.8 | |||
| Arm retraction | X: 620mm | 1.5 | 1.1 | |||
| PUT_WAIT | H2→H1 | Hand change | Z: 14mm | 1.0 | 1.0 | |
| PUT_RETRACT | H1 | Arm extension | X: 620mm | 1.5 | 1.1 | |
| Z-axis down | Z: 8mm | 0.8 | 0.8 | |||
| Arm retraction | X: 620mm | 1.5 | 1.1 | |||
| GET_WAIT | Rotation | θ: 180deg | 2.7 | 2.0 | ||
| Total | 22.6 | 16.4 | ||||
| Equipment throughput (standard) | 159 | 220 | ||||
*Pads are made of non-slip resin material that makes contact with the back side of
wafers. (Heat-resistant specification is 260°C or less.)
PAD-less motion corresponds to commands where acceleration of 0.15G or less is applied
to wafers.
PAD-included motion corresponds to commands where acceleration of 0.3G or less is
applied to wafers.
Advantages of introducing clean transfer robot ACTRANS
| Model | UTVW-R2800H | |
|---|---|---|
| Robot Type | axis Cylindrical Coordinate | |
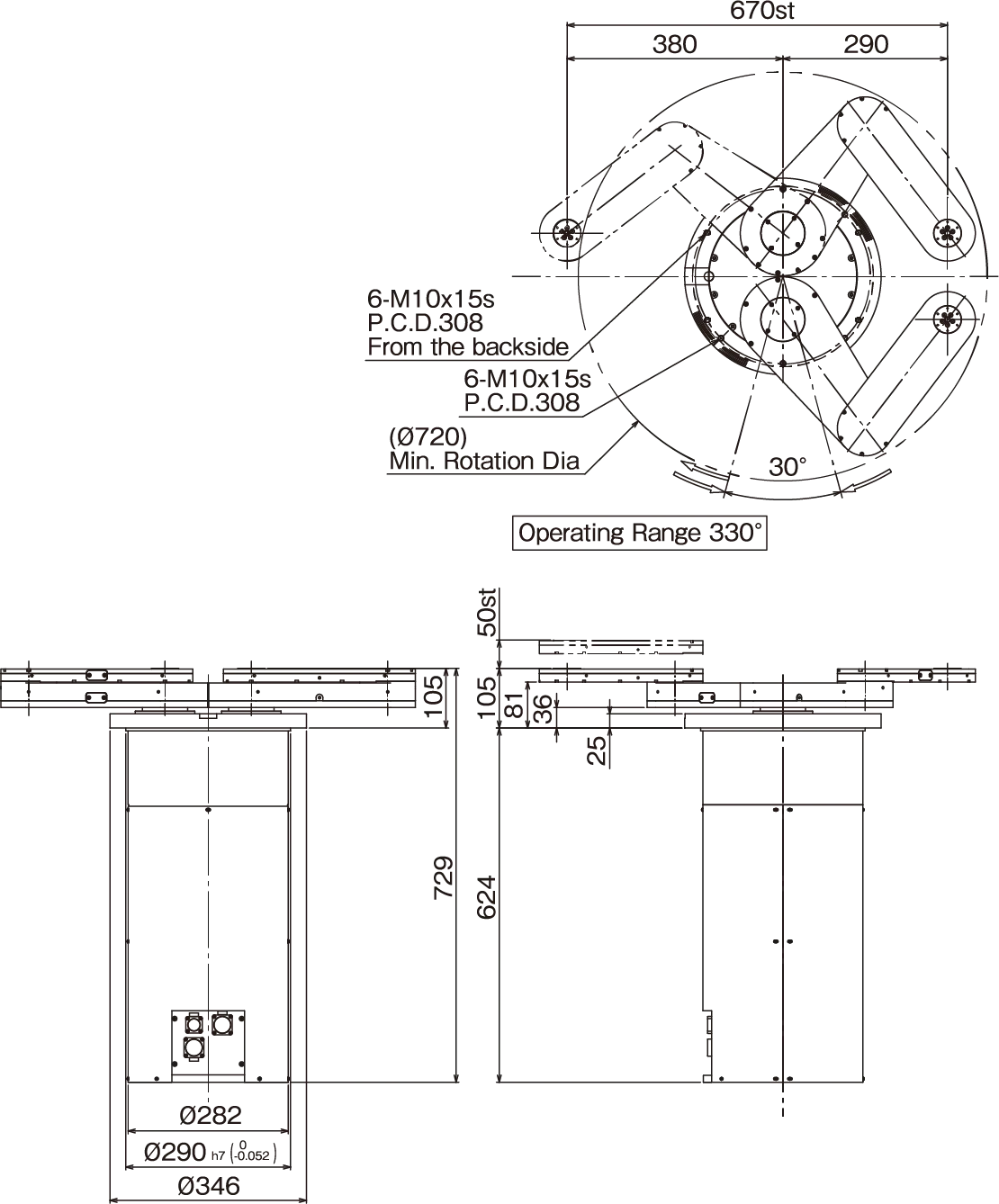
| Operation Range | X1, X2-axis | 670mm |
| θ-axis | 330° | |
| Z-axis | 50mm | |
| Max. Operation Speed | X1, X2-axis | 1400mm/sec. |
| θ-axis | 145°/sec. | |
| Z-axis | 50mm/sec. | |
| Operating Time | X1, X2-axis | 1.2sec./670mm |
| θ-axis | 2.0sec./180° | |
| Z-axis | 1.5sec./50mm | |
| Repeatability | XYZ direction: ±0.1mm each (3σ) (※2) | |
| Payload | 2.5kg (※3) | |
| Cleanliness | ISO Class 3 (ISO-14644) | |
| Mass | 85kg | |
| Environment | Temperature | 15-40℃ (Atm. side)/15-80℃ (Vacuum Seal Unit) |
| Humidity | 20-70%, No condensation | |
| Pressure | Atmospheric pressure ~ 10-6Pa | |
※1 Transfer performance differs from the standard when options are added.
※2 Under our evaluation conditions
※3 Total mass of hand base, hand, and wafer

Q&A - Frequently Asked Questions -






