



ACTRANS
導入のメリット








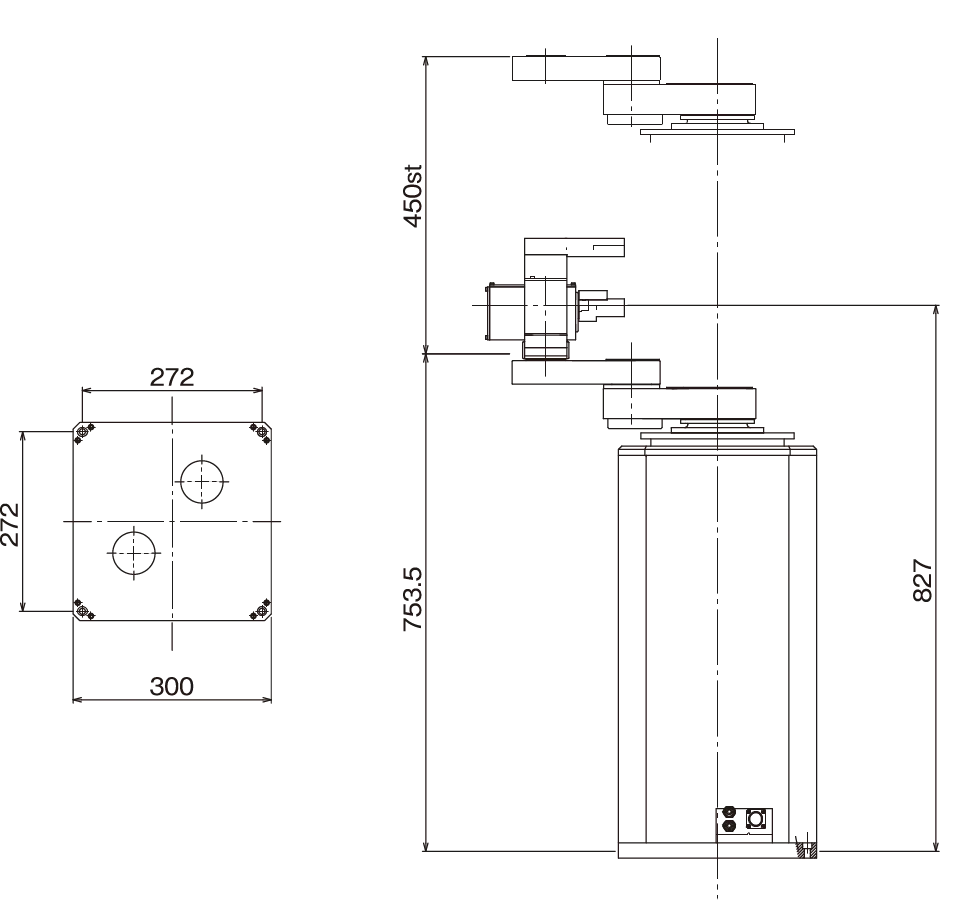
~300mmウエハ用高可搬モデル
高可搬搬送と広範囲動作が
可能な標準ロボット
サーボアンプを内蔵し、高速電力線通信技術利用により、ロボット本体内配線数及び外配ケーブル本数を大幅に削減。
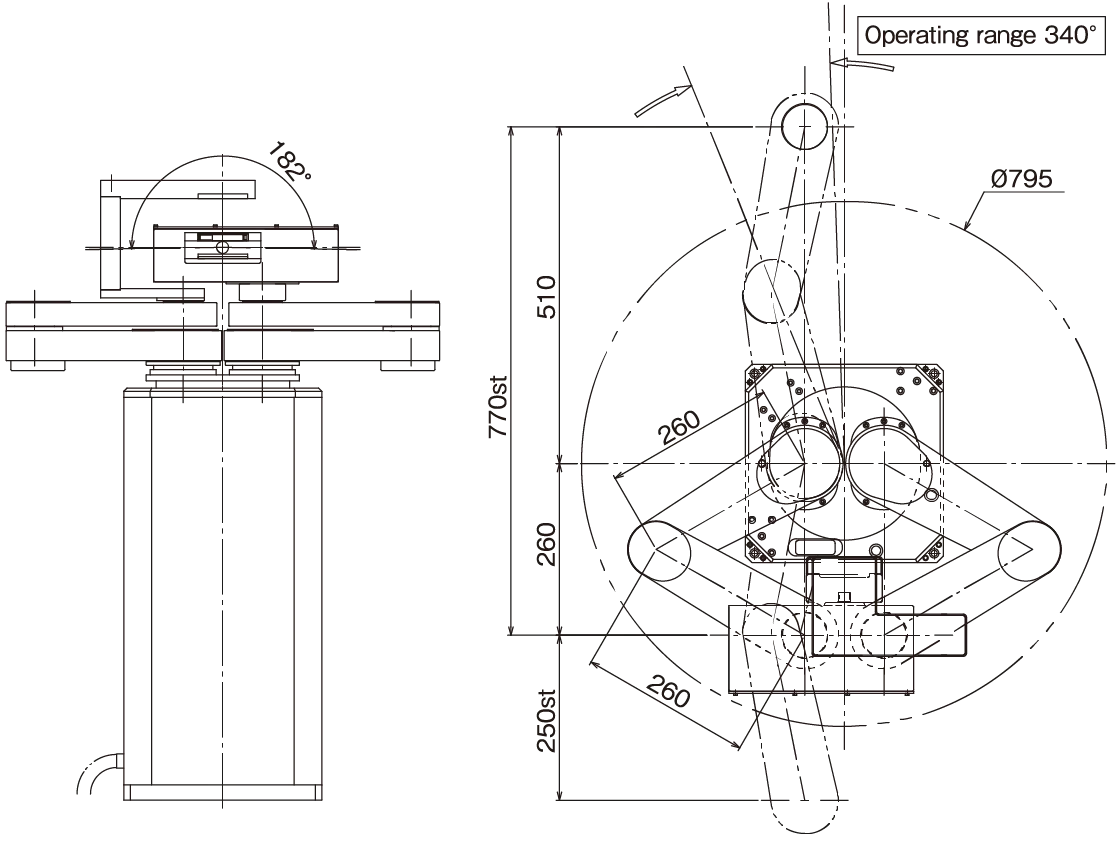
高可搬搬送(ハンドフォルダ、ハンド、搬送ワークの総質量4kg)を可能としたため、反転軸搭載が可能。
テープフレーム付きウエハ搬送、貼り合わせウエハ搬送、レチクル搬送が可能。
ワーク把持は、真空吸着方式に加え、圧空を使用したエッジクランプ方式とベルヌーイ方式に対応可能。

クリーン搬送ロボットACTRANS導入のメリット
| 型式 Model | UT-AFW4010NM | UT-AFW4000NM | |
|---|---|---|---|
| 分類 Category | Long Arm Type | High Payload Type | |
| ロボット形状 Robot Type | 4軸円筒座標型:4axis Cylindrical Coordinate | ||
|
動作範囲 Operation Range |
X1, X2-axis | 770mm | 500mm |
| θ-axis | 340° | ||
| Z-axis | 300mm or 450mm | ||
| R-axis | - | (182°) | |
|
最大動作速度 Max. Operation Speed |
X1, X2-axis | 1180mm/sec. | 800mm/sec. |
| θ-axis | 200°/sec. | ||
| Z-axis | 250mm/sec. | ||
| R-axis | - | (180°/sec.) | |
|
動作時間 Operation Time |
X1, X2-axis | 1.7sec./770mm | 1.7sec./500mm |
| θ-axis | 2.2sec./340° | ||
| Z-axis | 1.6sec./300mm | 2.2sec./450mm | |
| R-axis | - | (1.7sec./180°) | |
| 繰返し位置精度 Repeatability | XYZ±0.1mm |
XYZ±0.1mm, R±0.1° | |
| 可搬重量 Payload | 1kg/2N・m (※2) | 4kg/8N・m (※2) | |
|
クリーン度 Cleanliness |
クランプ仕様 Edge Clamp E/E Type |
ISO Class 3 (ISO-14644) | |
|
吸着仕様 Vacuum E/E Type |
ISO Class 1 (ISO-14644) | ||
| 必要諸元 Facilities | Air | - | 0.4-0.7MPa, 200L/min |
| Vacuum | -80kPa, 10NL/min | - | |
| 設置環境 Environment | 温度 Temperature | 0-40℃ | |
| 湿度 Humidity | 70% or less, No condensation | ||
※1
オプションを付加した場合の搬送性能は標準と異なります
※2
ハンドフォルダ、ハンド、ワーク質量の合計値

製品についてのQ&A






