



ACTRANS
導入のメリット




スカラアーム搭載による省スペース化と
ダイレクトドライブモータによる
高精度、低振動を実現した真空ロボット
先進後⼯程向けPLP搬送にも対応
先進後⼯程向けPLP搬送ロボットでの特⻑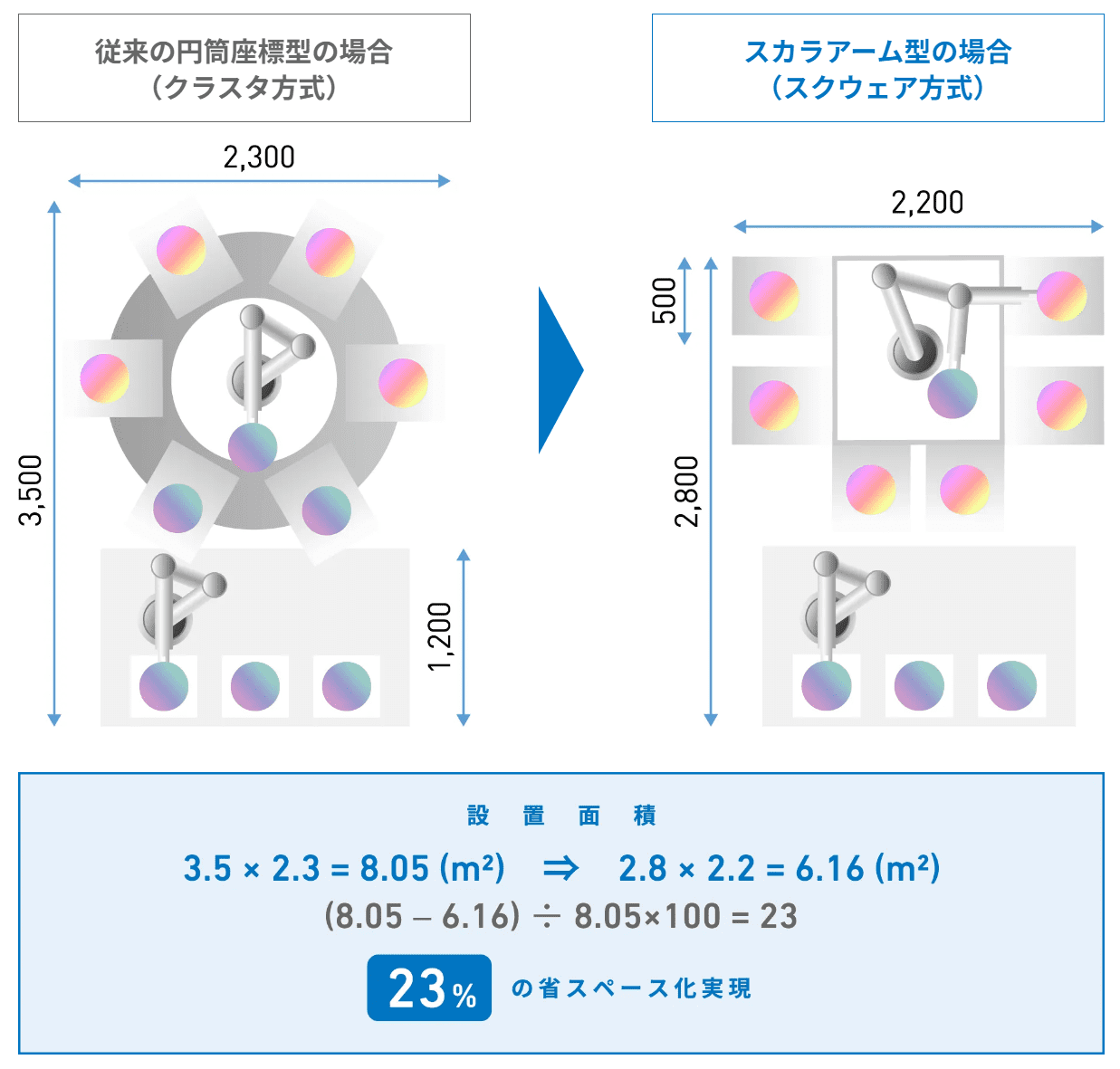
現在、クラスタ方式では、ロボットアームの動きがわかりやすい円筒座標型ロボットを搭載していますが、搬送モジュールが円形のため、真空装置のフットプリントが大きくなってしまいます。これをスクウェア方式にし、スカラアーム型ロボットでウエハの搬送を行うことで、真空装置のフットプリントを小さくすることができます。
クリーン搬送ロボットACTRANS導入のメリット
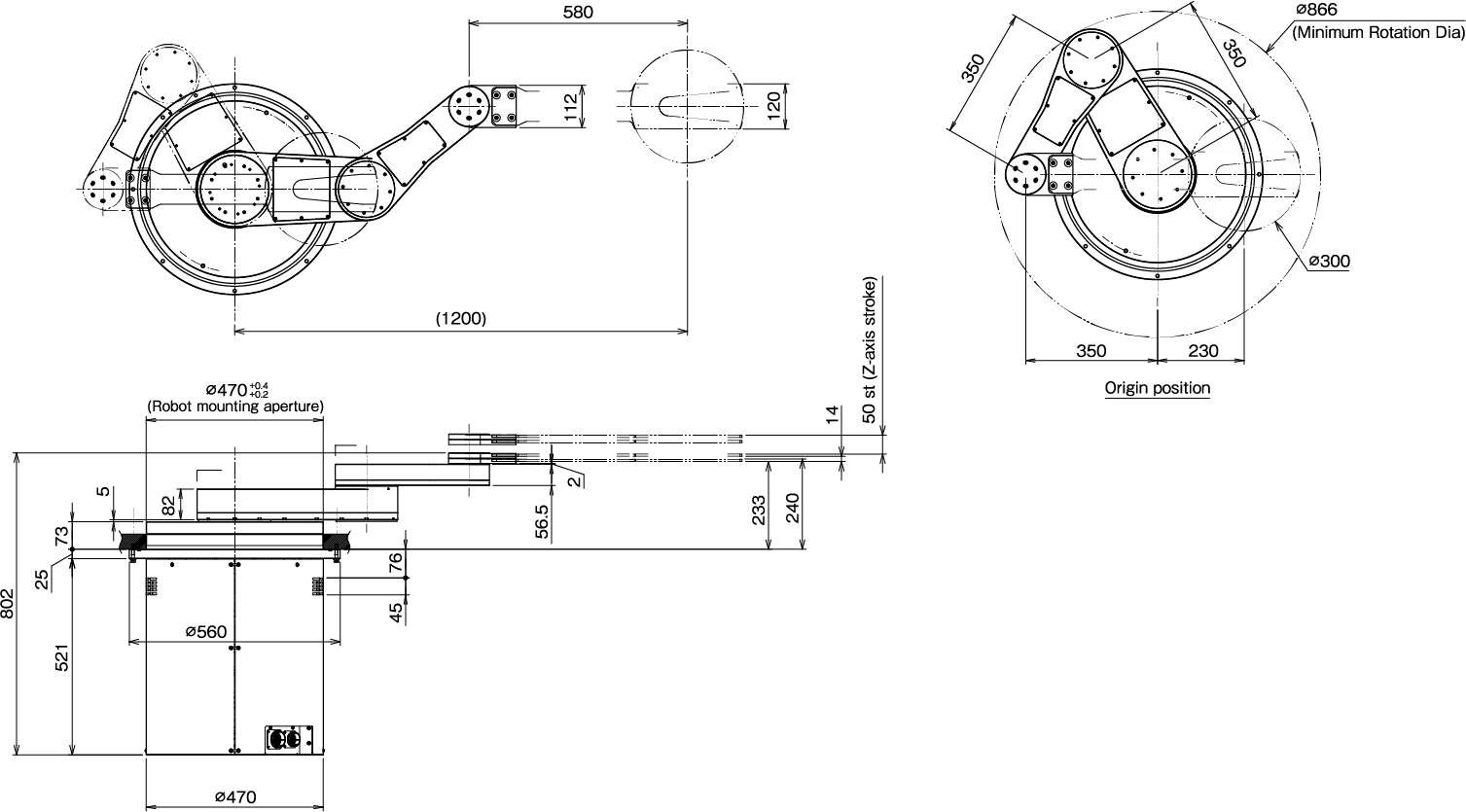
| 型式 Model | UT-VSW3001NS | UT-VSW3002NS | |
|---|---|---|---|
| ロボット形状 | 5軸水平多関節型 | ||
| ワーク把持方式 | 落とし込み式/摩擦把持方式 | ||
| 動作範囲(※2) | W2-axis | 20-340° | |
| W1-axis | 20-340° | ||
| B-axis | 20-340° | ||
| A-axis | Endless | ||
| Z-axis | 50mm | 135mm | |
| 最大速度 | W2-axis | 150° /sec | |
| W1-axis | 150° /sec | ||
| B-axis | 複合補間動作 | ||
| A-axis | |||
| Z-axis | 32mm/sec | ||
| 繰返し位置精度 | XYZ direction: P-P 0.05mm each (※3) | ||
| 可搬質量 | 1.0kg (※4) | ||
| クリーン度 | ISO Class 1 | ||
| 本体質量 | Approx. 260kg | Approx. 285kg | |
| 設置環境 | 温度 | 5-40℃ (Robot body) /5-80℃ (Arm) | |
| 湿度 | 20-70%, No condensation | ||
| 圧力 | Atmospheric pressure ~ 10-6Pa | ||
| 対応コントローラ | CFD19A2 | ||
※1. オプションを付加した場合の搬送性能は標準と異なります。
※2 アーム姿勢によっては制限があります。
※3 当社の評価による。
※4 ハンド、ウエハの合計質量。

製品についてのQ&A






