



ACTRANS
導入のメリット






走行軸無しで広範囲動作モデル
広範囲動作が可能な
多関節型ロボット

クリーン搬送ロボットACTRANS導入のメリット
| 型式 Model | UTM-R3700F | ||
|---|---|---|---|
| ロボット形状 Robot Type | 6-axis articulated system | ||
|
動作範囲 Operation Range |
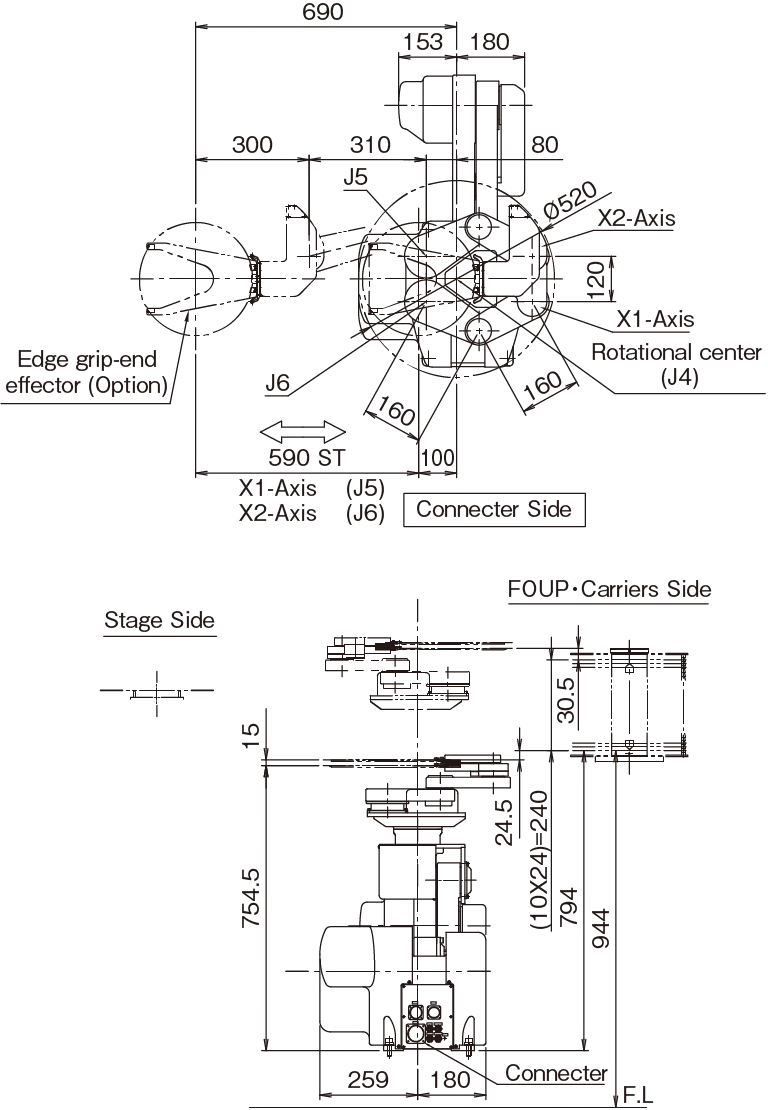
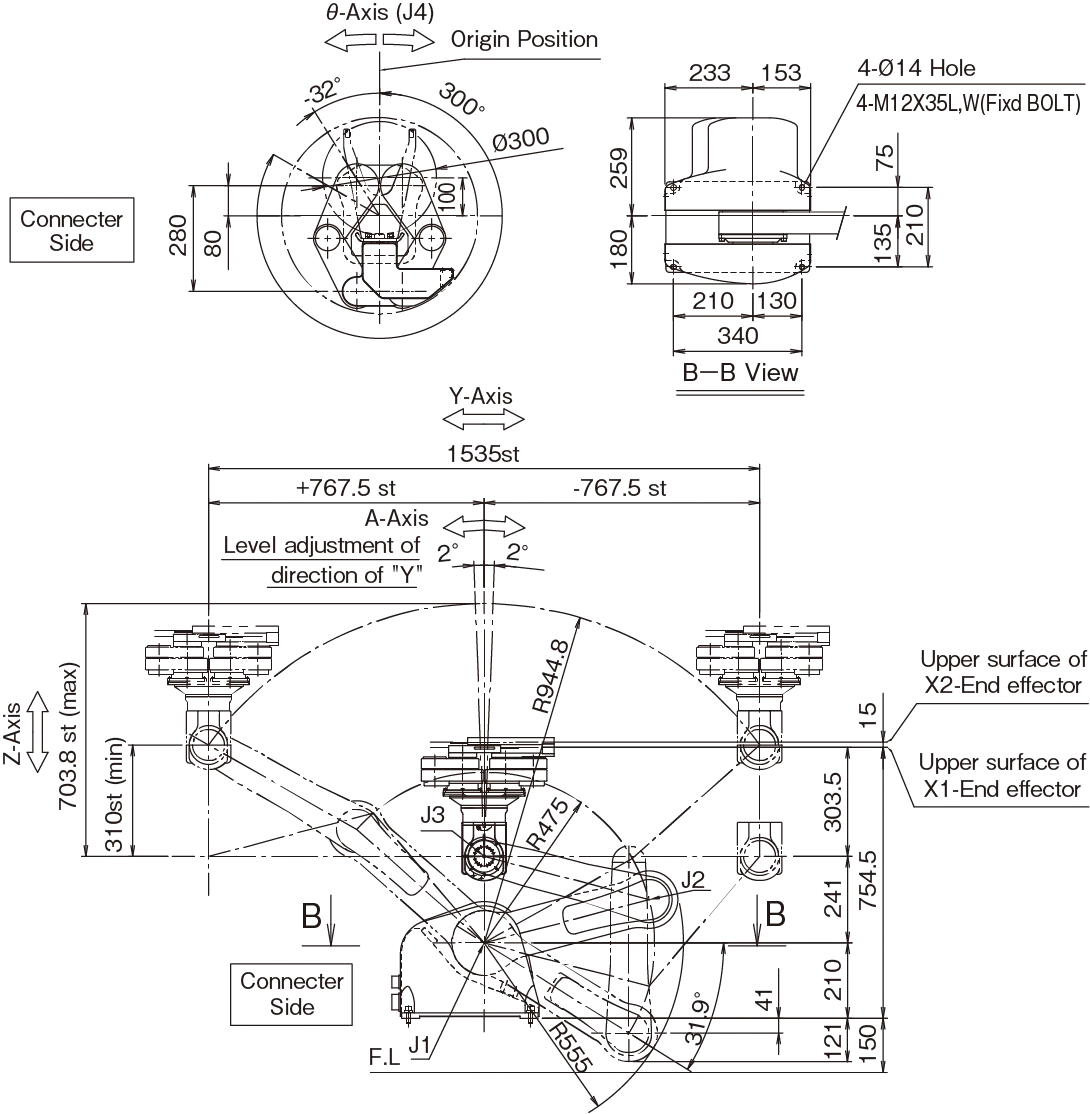
X1, X2-axis(前後)(Extension) | 590mm | |
| θ-axis(旋回)(Rotation) | 332° | ||
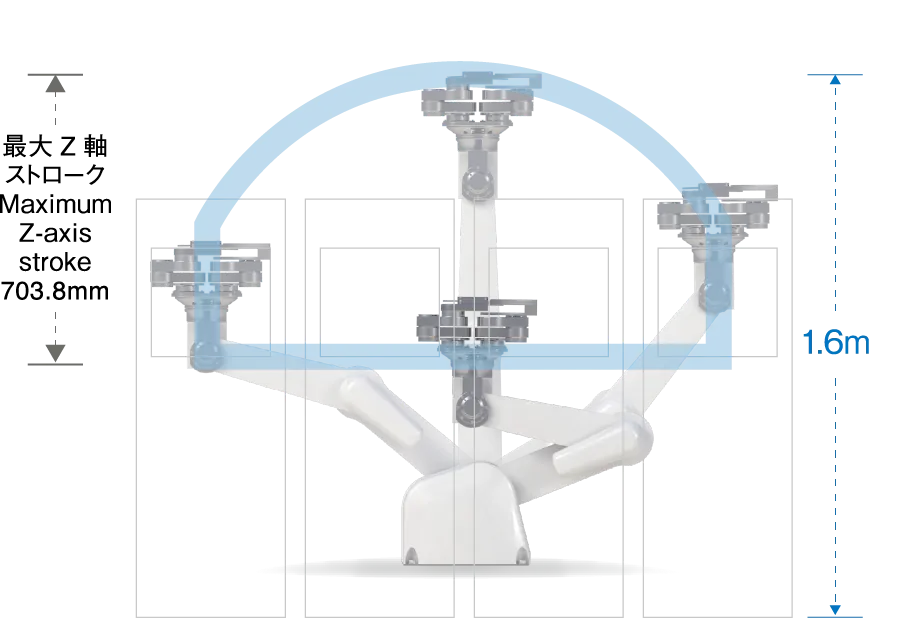
| Z-axis(昇降)(Elevation) | 310-703.8mm | ||
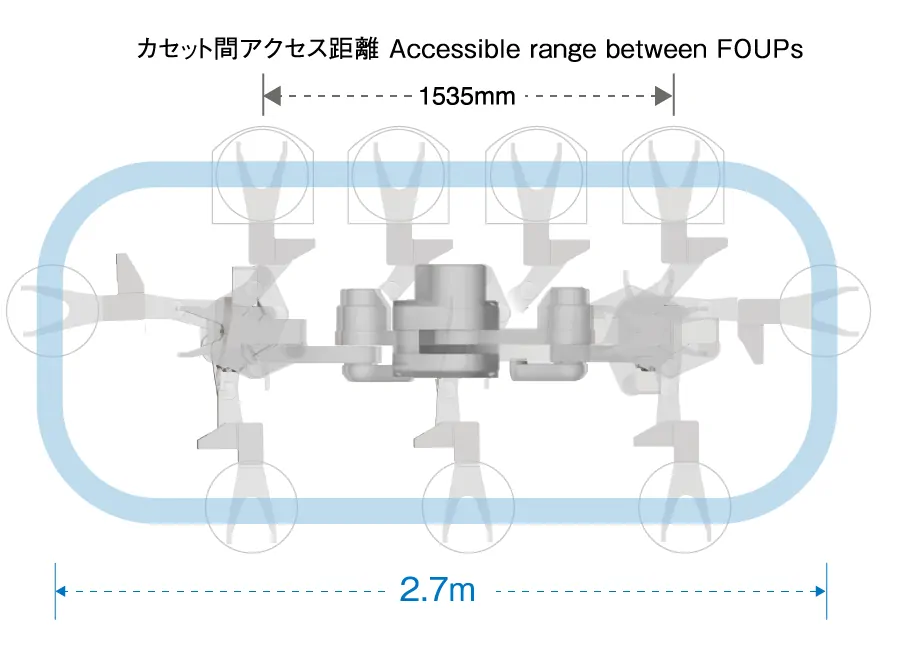
| Y-axis(左右)(Slide) | ±767.5mm | ||
| A-axis(左右の傾き補正)(Correction of Y-axis tilt) | ±2° | ||
|
最大動作速度 Max. Operation Speed |
X1, X2-axis | 1600mm/sec. | |
| θ-axis | 540°/sec. | ||
| Z-axis | 1500mm/sec. | ||
| Y-axis | 1500mm/sec. | ||
|
動作時間 Operation Time |
X1, X2-axis | 0.9sec./590mm | |
| θ-axis | 1.0sec./332° | ||
| Z-axis | 0.8sec./703.8mm | ||
| Y-axis | 1.4sec./1535mm | ||
| 繰返し位置精度 Repeatability | XθY directions(composite): ±0.1mm, Z direction: ±0.1mm | ||
| 可搬重量 Payload | 0.5kg/arm(including Hand, Wafer) | ||
|
クリーン度 Cleanliness |
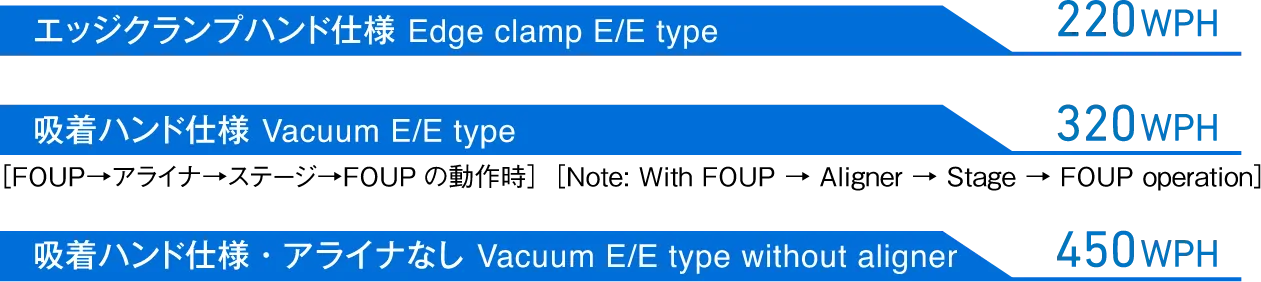
クランプ仕様 Edge Clamp E/E type | ISO Class 3(ISO-14644) | |
| 吸着仕様 Vacuum E/E type | ISO Class 1(ISO-14644) | ||
| 本体質量 Mass | 74kg | ||
|
必要諸源 Facilities |
クランプ仕様 Edge Clamp E/E type | エア Air | 0.3-0.7MpaG |
| 吸着仕様 Vacuum E/E type | 真空 Vacuum | -80kPaG or less, 10NL/min. | |
| 真空(機内排気用) Vacuum(for purging) | -80kPaG or less, 40NL/min total | ||
|
設置環境 Environment |
温度 Temperature | 0-40℃ | |
| 湿度 Humidity | 20-70%, No condensation | ||
※1
オプションを付加した場合の搬送性能は標準と異なります
※2
オプションとして在荷センサ・マッピングセンサを搭載可能です

製品についてのQ&A






