



ACTRANS
導入のメリット




~300mmウエハ用
高温プロセスに対応した
高精度・低振動ダブルアーム真空ロボット
PM(プロセスモジュール)において、処理済みウエハを処理前ウエハと入れ替え、その処理済みウエハをLL(ロードロックモジュール)に置かれた処理前ウエハと入れ替えて、プロセスモジュール前に待機するまでのタクトタイム例を掲載します。
| 動作時間(sec.) | ||||||
|---|---|---|---|---|---|---|
|
アクセス モジュール |
指令コマンド | 選択ハンド | 動作仕様 | 動作量 |
PAD無し (0.15G)※ |
PAD有り (0.3G)※ |
| PM | GET_RETRACT | H1 | アーム前進 | X: 670mm | 1.5 | 1.2 |
| Z軸UP | Z: 8mm | 0.8 | 0.8 | |||
| アーム退避 | X: 670mm | 1.5 | 1.2 | |||
| PUT_WAIT | H1→H2 | ハンド入替 | Z: 14mm | 1.0 | 1.0 | |
| PUT_RETRACT | H2 | アーム前進 | X: 670mm | 1.5 | 1.2 | |
| Z軸DOWN | Z: 8mm | 0.8 | 0.8 | |||
| アーム退避 | X: 670mm | 1.5 | 1.2 | |||
| GET_WAIT | 回転 | θ: 180deg | 2.7 | 2.0 | ||
| LL | GET_RETRACT | H2 | アーム前進 | X: 620mm | 1.5 | 1.1 |
| Z軸UP | Z: 8mm | 0.8 | 0.8 | |||
| アーム退避 | X: 620mm | 1.5 | 1.1 | |||
| PUT_WAIT | H2→H1 | ハンド入替 | Z: 14mm | 1.0 | 1.0 | |
| PUT_RETRACT | H1 | アーム前進 | X: 620mm | 1.5 | 1.1 | |
| Z軸DOWN | Z: 8mm | 0.8 | 0.8 | |||
| アーム退避 | X: 620mm | 1.5 | 1.1 | |||
| GET_WAIT | 回転 | θ: 180deg | 2.7 | 2.0 | ||
| 合計 | 22.6 | 16.4 | ||||
| 装置スループット(目安)(wph) | 159 | 220 | ||||
※PADとは、ウエハ裏面に接触し、滑り防止用樹脂材(耐熱仕様は260℃以下)
PAD無し動作は、ウエハにかかる加速度が0.15G以下の指令である
PAD有り動作は、ウエハにかかる加速度が0.3G以下の指令である
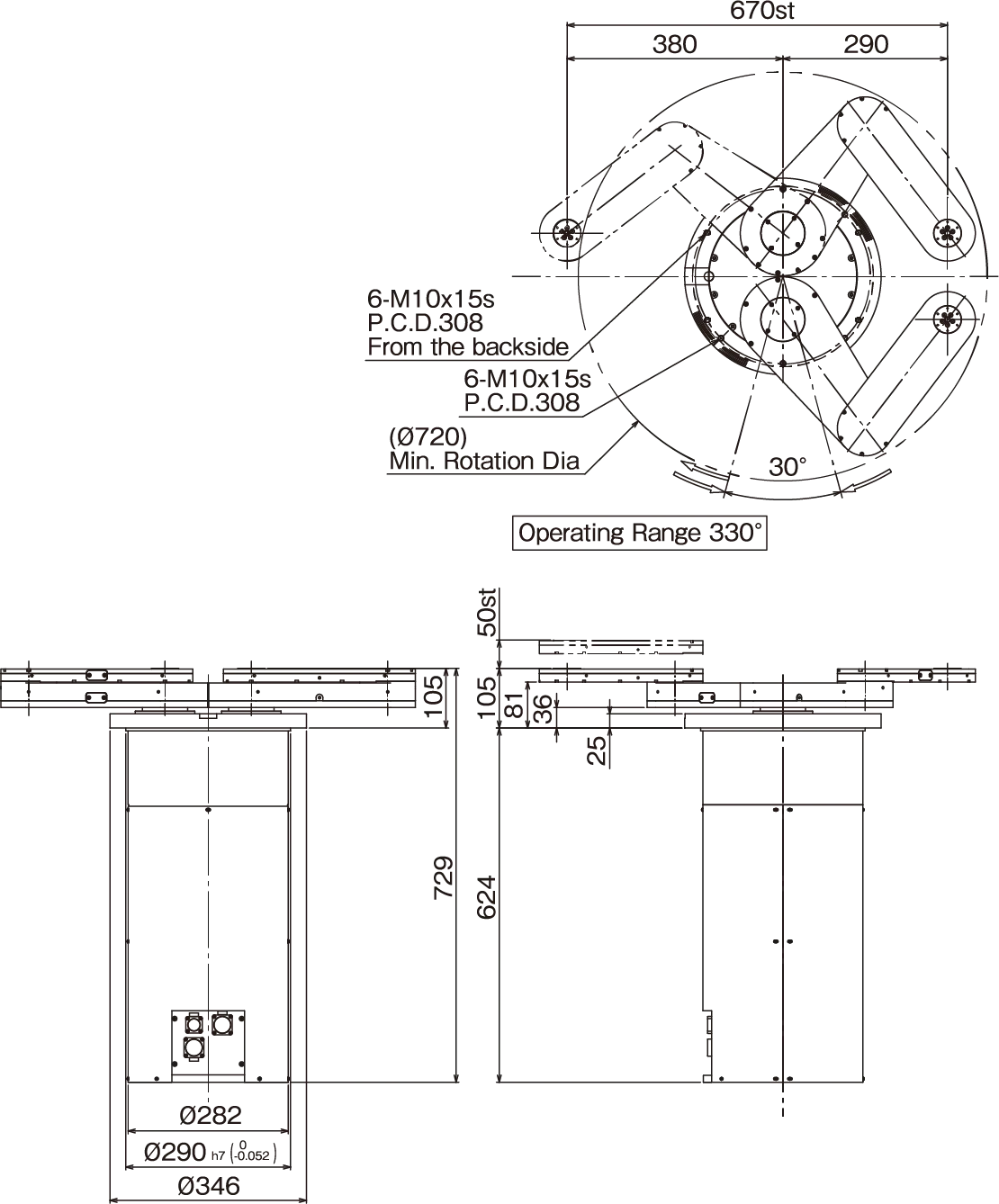
クリーン搬送ロボットACTRANS導入のメリット
| 型式 Model | UTVW-R2800H | |
|---|---|---|
| ロボット形状 Robot Type | 4軸円筒座標形: 4 axis Cylindrical Coordinate | |
|
動作範囲 Operation Range |
X1, X2-axis | 670mm |
| θ-axis | 330° | |
| Z-axis | 50mm | |
|
最大動作速度 Max. Operation Speed |
X1, X2-axis | 1400mm/sec. |
| θ-axis | 145°/sec. | |
| Z-axis | 50mm/sec. | |
|
動作時間 Operating Time |
X1, X2-axis | 1.2sec./670mm |
| θ-axis | 2.0sec./180° | |
| Z-axis | 1.5sec./50mm | |
| 繰返し位置精度 Repeatability | XYZ direction: ±0.1mm each (3σ) (※2) | |
| 可搬質量 Payload | 2.5kg (※3) | |
| クリーン度 Cleanliness | ISO Class 3 (ISO-14644) | |
| 本体質量 Mass | 85kg | |
| 設置環境 Environment | 温度 Temperature | 15-40℃ (Atm. side)/15-80℃ (Vacuum Seal Unit) |
| 湿度 Humidity | 20-70%, No condensation | |
| 圧力 Pressure | Atmospheric pressure ~ 10-6Pa | |
※1
オプションを付加した場合の搬送性能は標準と異なります
※2
当社の評価条件による
※3
ハンドベース、ハンド、ウエハの合計質量

製品についてのQ&A






